

可编程序控制器原理与应用理论试卷十
单位___________ 姓名___________ 班级____________
注 意 事 项
- 本试卷依据课程标准命制,考试时间:120分钟。
- 请在试卷相应位置上填写姓名、准考证号和所在单位的名称,并用2B铅笔填涂答题卡上的相应位置处。
- 考试结束后,考生务必将上交试卷和答题卡。
- 答卷必须用蓝色或黑色钢笔、圆珠笔,不许用铅笔或红笔。
- 考试应按要求作答,如不按要求进行作答,一律视为作答无效。
| 一 | 二 | 总分 |
得分 |
|
|
|
- 选择题(请将正确答案的代号填入括号内,每题1分,共80分)
- 加法指令的助记符是( )
A.ADD
B.SUB
C.MUL
D.DIV
- 下列关于减法指令标志位说法正确的选项是( )
A.相减结果为0,零标志位M8020=1;
B.相减发生借位,借位标志M8021=0;
C.若相减发生进位,进位标志M8022=0。
D.若将浮点数标志位M8023置1,则可以进行浮点数加法运算。
- 乘法指令的助记符是( )
A.ADD
B.SUB
C.MUL
D.DIV
- 乘法指令FNC22 MUL [S1·] [S2·] [D·],下列说法正确的选项是( )
A.[S1·] [S2·]分别为作为被乘数和乘数的源软组件;
B.[D·]为商的目标组件的首地址;
C.源操作数可取所有数据类型;
D.目标操作数可取KnY、KnM、KnS、D、V和Z;
- 加1指令助记符是( )
A、DADD
B、DDIV
C、INC
D、DEC
- 三菱FX2N系列PLC中有( )逻辑运算指令
A.2条
B.4条
C.6条
D.8条
- 逻辑字与指令是( )
A.WAND
B.WORD
C.WXOR
D.NEG
- 下列关于逻辑字与指令说法错误的是( )
A.逻辑字与指令的功能是将指定两源元件中数,进行二进制按位“与”,然后将相“与”结果送入指定的目软元件中。
B.逻辑字与指令的指令编码是FNC27
C.逻辑字与指令前面的“W”表示16位字操作
D.DWANDP指令是双字与指令的脉冲执行方式
- WOR指令是( )
A.逻辑与
B.逻辑字与
C.逻辑或
D.逻辑字或
- 下列关于WOR指令,说法错误的选项是( )
A.WORD指令的功能是将指定的两个源元件中的数,进行二进制按位“或”,然后将相“或”结果送入指定的目标元件中。
B.WOR前面的“W”表示32位字操作
C.WOR指令操作16位数据,DWOR指令操作32位数据
D.WORP指令是WOR指令的脉冲执行方式。
- 逻辑异或指令是( )
A.WAND
B.WOR
C.WXOR
D.NEG
- 下列异或逻辑运算结果错误的是( )
A.1异或1结果为1
B.1异或0结果为1
C.0异或1结果为1
D.0异或0结果为0
- 下列关于异或指令说法错误的选项是( )
A.异或指令的功能是将指定的两个源软元件中的数,进行二进制按位“异或”,然后将相“异或”结果送入指定的目元件中。
B.“异或”运算可以理解为不考虑进位的按位减法运算
C.异或指令可以分为16位数据操作指令和32位数据操作指令两种形式。
D.异或指令可以分为连续执行方式和脉冲指令方式两种形式
- NEG指令是( )
A.异或指令
B.译码指令
C.求补指令
D.同或指令
- 下列关于NEG指令说法错误的选项是( )
A.NEG指令的指令编号是FNC29
B.NEG指令执行时占3步程序步,DNEG指令执行时占5步程序步。
C.NEG指令的功能是将指定的目标元件中的数,进行二进制求补运算,然后将求补结果再送入目元件中
D.求补同求补码是相同的
- 下列关于ROR指令说法正确的选项是( )
A.ROR指令的指令编号及助记符: FNC31 ROR [D·] n
B.移位量参数n=16
C.ROR指令的功能是将指定的目软组件中的二进制数按照指令中n规定的移动的位数由低位向高位移动,最后移出的那一位将进入进位标志位M8022。
D.DRORP指令是ROR指令的32位脉冲操作方式,占9步程序步。
- 下列关于左循环移位指令,说法错误的是( )
A.左循环移位指令的指令编号是FNC31
B.左循环移位指令可以操作16位数据,也可以操作32位数据。
C.ROL指令的执行类似于ROR,只是移位方向相反
D.左循环移位指令执行过程中,最后移出的那一位将进入进位标志位M8023
- RCR指令是( )
A.循环左移
B.循环右移
C.带进位循环左移
D.带进位循环右移
- 带进位循环左移指令的指令编号是( )
A.FNC33
B.FNC34
C.FNC35
D.FNC36
- 下列关于带进位循环左移指令说法正确的选项是( )
A.RCL及RCLP指令占用6步程序步
B.DRCL及DRCLP指令占用8步程序步
C.RCL指令可以操作16位数据和32位数据
D.带进位循环左移指令使16位、32位数据连同进位一起向右 循环移位“n”位。如果M8022在执行循环指令前OFF,则循环中的进位标志被送到目标。
- 循环移位指令影响的特殊辅助继电器是( )
A.M8021
B.M8022
C.M8023
D.M8025
- 位组件右移指令是( )
A. ROR
B. RCR
C.SFTR
D. SFTL
- 下列关于位组件右移指令,说法错误的是( )
A.位组件右移指令的指令编号是FNC34
B.位组件右移指令的目操作数为Y、M、S;
C.SFTR、SFTRP指令占9步程序步。
D.位组件右移指令可以操作16位数据,也可以操作32位数据
- 下列关于字元件右移指令,说法错误的选项是( )
A.字元件右移指令以字为单位,其工作的过程与位移位相似。
B.字右移位指令占用9个程序步
C.字右移指令可以操作16位数据,也可以操作32位数据。
D.字右移指令的指令编号是FNC36
- 字右移指令结构表达式:FNC36 WSFR(P) [S·][D·] n1 n2,下列说法错误的是( )
A.[S·]为移位的源字元件首地址,源操作数可取KnX、KnY、KnM、KnS、T、C和D
B.[D·]为移位的目标字元件首地址,目标操作数可取KnY、KnM、KnS、T、C和D;
C.n1为目标字元件个数,n2为源字元件移位个数;
D.n1,n2 可取K(十进制)
- SFWR是( )指令
A.先进后出控制的数据写入指令
B.后进先出控制的数据写入指令
C.后进后出控制的数据写入指令
D.先进先出控制的数据写入指令
- 下列关于SFWR指令,说法错误的选项是( )
A.SFWR指令的结构表达式:FNC38 SFER(P)[S·][D·] n
B. SFWR指令的结构表达式中,n的取值范围:2≤ n≤512
C.SFWR指令可以操作16位数据,也可以操作32位数据。
D.SFWRP是SFWR指令的脉冲执行方式,占7步程序步。
- PLC通过控制电磁阀动作,从而控制推料气缸推出与缩回,实现( )。
A.气缸动作
B.物料传送
C.物料搬运
D.物料分拣
- 单相电源插座用于模块电源连接和给外部设备提供电源,模块之间电源连接采用( )连接。
A.线槽方式
B.导轨方式
C.安全导线方式
D.随意
- 触摸屏作为一种最新的电脑输入设备,它是目前( )的一种人机交互方式。
A.最简单
B.最方便
C.最自然
D.以上都是
- 电源模块包括三相电源总开关以及( )等。
A.熔断器
B.指示灯
C.按钮
D.蜂鸣器
- 下列( )不是按钮与指示灯模块的电气元件。
A.自锁型按钮
B.指示灯
C.急停按钮
D.熔断器
- 磁性传感器又称为磁性开关,是一种利用磁场信号来控制的线路开关器件,也叫( )
A.按钮
B.开关
C.磁控开关
D.磁感器
- 光电传感器是采用光电元件作为检测元件的传感器,通过把光强度的变化转换成( )的变化来实现控制的
A.电信号
B.能量
C.电量
D.非电量
- 光E3Z-LS61漫反射式光电传感器安装在圆盘送料机构出口处的接料平台上,用于圆盘送料机构( )。
A.进料检测
B.抓料检测
C.配料检测
D.出料检测
- M18圆柱型光电开关安装在皮带输送机的进料口处,用于皮带输送机的进料检测。当进料口进料时,传感器有( )。
A.动作
B.信号
C.感应
D.闪烁
- ( )用来控制气缸进气和出气,从而实现气缸的伸出、缩回运动。
A.单向电控阀
B.双向电控阀
C.行程阀
D.PLC
- 当供料装置处于运行状态时,若接料平台上没有物料,则直流电机( ),供料装置向接料平台供料,当接料平台上有物料时,直流电机自动( )。
A.启动、自动停止
B.自动停止、启动
C.启动、启动
D.停止、停止
- 启动前,供料装置的运动部件必须在规定的位置,这些位置称作( )。
A.装配位置
B.启动位置
C.初始位置
D.以上都不对
- 自锁型按钮一般是指按钮自带机械锁定功能,按下去,松手后按钮是不会跳起来的,处于锁定状态,需要再按( )次,才能解锁复位。
A、一 B、二 C、三 D、四
- 在按钮第一次按时,按钮接通并保持,即自锁,在按钮第二次按时,开关 ,同时按钮 。( )
A、闭合 弹起来 B、闭合 保持位置不变
C、断开 弹起来 D、断开 保持位置不变
- ( )又称组合开关。
A、按钮开关 B、转换开关 C、行程开关 D、隔离开关
- 转换开关具有多触点、多位置等优点,可作为直接控制 异步电动机 起动、停止及换向等操作。( )
A、大容量 不频繁 B、小容量 不频繁
C、大容量 频繁 D、小容量 频繁
- 气源处理元件:包括后冷却器、过滤器、干燥器和( )等。
A、气罐 B、排水器 C、安全服 D、油雾器
- 各类传感器:包括磁性开关、限位开关、( )、气动传感器等。
A、压力开关 B、组合开关 C、按钮开关 D、空开
- 气动回路中: 控制阀:控制气动输出力的大小; 控制阀:控制气缸的运动方向; 控制阀:控制气缸的运动速度。( )
A、压力 方向 速度 B、方向 速度 压力
C、压力 速度 方向 D、速度 方向 压力
- 辅助元件包括( )。
A、气马达 B、真空发生器 C、消声器 D、集中润滑元件
- 气动系统一般由( )的基本回路组成。
A、复杂 B、困难 C、一般 D、简单
- 在气动系统中,有时需要提供( )种不同的压力,来驱动双作用气缸在不同方向上的运动。
A、一 B、二 C、三 D、四
- YL-235A机电一体化实训设备上的气动机械手主要由气缸、检测传感器、( )以及机架、缓冲期等几部份组成。
A、单作用电磁阀 B、电磁阀 C、双用电磁阀 D、双作用电磁阀
- 气动机械手的气缸部分由悬臂气缸、手臂气缸、( )和旋转气缸组成。
A、手爪气缸 B、气缸 C、移动气缸 D以上都是
- 气动机械手通过四个双作用二位五通电磁阀分别控制悬臂气缸伸出/缩回,手臂气缸( ),旋转气缸左旋右旋,手爪气缸夹紧/松开来实现四个自由度的动作。
A、上升 B、上升/下降 C、下降 D、以上都是
- 下列选项中关于YL-235A气动机械手的控制的说法错误的是( )
A. 机械手是一种能模仿人手和手臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
B. 机械手不是是最早出现的工业机器人,也不是最早出现的现代机器人。
C. 机械手可以代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。
D.机械手广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
- 主电路接线时,电源输入端是送入380V交流电压的,电源线必须连接至输入端( )S/L2、T/L3,绝对不能接到输出端U、V、W,否则会损坏变频器。
A、R/L1、
B、S/L1
C、T/L1
D、R/L2
- 如果把参数Pr.183设置为8,将RMS端子的功能转换成多速段控制端( ),就可以用RH、RM、RL和( )通断的组合来实现15段速。
A、REX、REX
B、REX、RW
C、RT、REX
D、RW、RT
- 根据传感器的输出方式,传感器可以分为( )输出型和( )输出型两种类型。
A、PNP NPN
B、APN NPN
C、NPN FPN
D、CPN NPN
- PNP与NPN型传感器其实就是利用三极管的( )输出两种状态
A、放大、饱和
B、放大、截止
C、饱和、放大
D、饱和、截止
- PNP与NPN型传感器(开关型)分为( )类。
A、5
B、6
C、7
D、8
- 很多机电设备都需要设置初始位置,当设备中的相关部件不在( )时,设备就不能启动运行。
A、任意位置
B、终点位置
C、初始位置
D、运动位置
- 为了保证设备和人身安全,机电设备必须设置初始位置,它是设备或装置运行的( )。
A、起点
B、终点
C、中点
D、圆点
- YL-235A物料传送及分拣机构由( )及分拣系统两部分组成。
A、分拣识别、皮带识别
B、物料识别、皮带识别
C、分拣系统、物料识别
D、皮带输送、物料识别
- 落料口传感器的作用为( )。
A、将物料推入料槽,由电控气阀控制
B、PLC输入信号,检测是否有物料到传送带上
C、放置物料
D、物料落料位置定位
- 当接料平台上的光电传感器检测到物料时,圆盘送料机构的直流电机( )转动。
A、启动
B、停止
C、反转
D、正转
- 接通电源,如果电源正常供电,工作台上双色警示灯中( )闪亮。
A、红灯
B、黄灯
C、绿灯
D、白灯
- 设备启动后,工作台上的双色警示灯中的绿灯开始闪亮,同时圆盘送料机构上的直流电机带动( )开始转动。
A、机械手的悬臂
B、悬臂气缸
C、处理盘
D、拨料杆
- FX系列PLC中,位右移指令应用( )
A、DADD B、DDIV C、SFTR D、SFTL
- FX系列PLC中,位左移指令应用( )
A、DADD B、DDIV C、SFTR D、SFTL
- 电路安装结束后,一定要进行通电前检查,保证电路连接正确,没有( )等不符合工艺要求的现象。
A、外露铜丝过长、一个接线端子上有超过两个接头
B、外露铜丝过长、一个接线端子上有超过三个接头
C、外露铜丝过短、一个接线端子上有超过两个接头
D、外露铜丝过短、一个接线端子上有超过三个接头
- CML指令的作用是( )
A.传送指令
B.取反传送指令
C.比较指令
D.批处理指令
- 下列关于传送指令说法错误的选项是( )
A.传送指令 MOV 是将源操作数内的数据传送到指定的目标操作数内
B.传送指令可以传送16位数据
C.传送指令可以传送32位数据
D.传送指令占2步程序步
- DMOVP指令的功能是( )
A.16位数据传送指令的连续执行方式
B.16位数据传送指令的脉冲执行方式
C.32位数据传送指令的连续执行方式
D.32位数据传送指令的脉冲执行方式
- CMP指令的比较结果有三种,下列( )不属于CMP比较指令的比较结果。
A.大于
B.等于
C.不等于
D.小于
- 下列关于比较指令,说法错误的选项是( )
A.CMP指令可以比较两个16位二进制数,也可以比较两个32位二进制数
B.CMP指令也可以有脉冲操作方式,使用后缀(P)
C.指令编号及助记符:FNC10 CMP[S1·][S2·][D·]
D.若D·=M0,则当S1=S2时,M1=0
- 下图所示的梯形图程序,分析错误的选项是( )

A.X000常开触点由断开到闭合时,MOVP指令将D0中的数据传送到D20中。
B.X000常开触点由闭合到断开时,MOVP指令将D0中的数据传送到D20中。
C.X000常开触点闭合时,常数K200被传送到D30中
D.X000常开触点闭合时,每个扫描周期均执行一次K200→D30
- 如下图所示的梯形图程序,说法错误的选项是( )
![]()
A.X000常开触点闭合时,移位传送指令发生作用
B.X000常开触点闭合时,将D1中第4位开始的2个数移位到D2中第3位开始的2个位置上去。
C.移位传送指令一般用于多位BCD拨盘开关的数据输入。
D.移位传送指令的编号及助记符:FNC13 SMOV [S·] m1 m2 [D·] n,其中,m1、m2、n的取值范围为0~8
- 如下图所示的梯形图程序,下列说法正确的是( )
![]()
A.X000常开触点断开时,CML指令发生作用
B.CML指令执行时,首先将D0中的8位数据按位取反
C.CML指令执行时,将D0中的数据取反后送到K4Y000中
D.K4Y000表示以Y000为最低位的8位目标元件
- 如下图所示的梯形图程序,选项中错误的是( )
![]()
A.当X000常开触点闭合时,D5中的数据传送到D10中
B.当X000常开触点闭合时,D6中的数据传送到D11中
C.当X000常开触点闭合时,D7中的数据传送到D12中
D.当X000常开触点闭合时,D8中的数据传送到D13中
- 下图所示的梯形图控制程序中,执行结果正确的选项是( )
![]()
A.X000常开触点闭合时,D5中的数据被传送到D10中。
B.X000常开触点闭合时,D6中的数据被传送到D11中。
C.X000常开触点闭合时,D7中的数据被传送到D12中。
D.X000常开触点闭合时,D8中的数据被传送到D13中。
- 关于下列梯形图,说法正确的选项是( )
![]()
A.该程序中,使用了数据交换指令的连续执行方式
B.当X000常开触点断开时,执行数据交换指令
C.该程序中,操作数为32位数据
D.该程序的执行结果是,D10中的数据传送到D20中,D20中原有数据传送到D10中,相当与两个数据寄存器互换数据。
- 如下图所示的抢答器控制案例程序中,分析正确的选项是( )
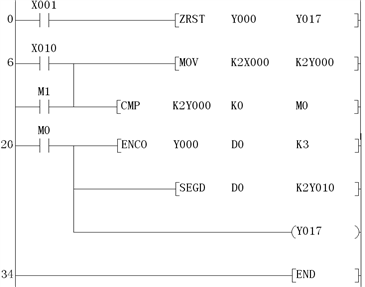
A.X001常开触点闭合时,Y000和Y017输出继电器复位。
B.X010常开触点闭合时,X000~X007组成的8位二进制数据被传送到Y000~Y007中。
C.X010常开触点闭合时,当Y000~Y007组成的8位二进制数据等于0时,M0=1
D.SEGD是译码指令
- 判断题(正确的在括号内打“√”,错误的在括号内打“×”,每题1分,共20分)
- 步进电机是利用电磁原理将电脉冲信号转换成电压信号。( )
- 在步进电动机的PLC控制案例中,采用传送指令指令实现电动机正反转和调速控制。( )
- 高压变频器指工作电压在10kV以上的变频器。( )
- 参数设定时的确定是按面板的RUN键。( )
- 在变频器参数设置中,按MODE键进入参数设定模式。( )
- SFRD是先进先出控制的数据读出指令。( )
- 字左移指令是WSFR。( )
- 位组件左移指令SFTL的指令编号是FNC35。( )
- 左循环移位指令是RCL。( )
- 16位除法指令应用DIV。( )
- 减法指令的助记符是SUB。( )
- BIN变换指令与BCD变换指令的功能刚好相反。( )
- BCD变换指令操作16位数据时,数据范围是0~32767。( )
- 数据交换指令可以操作16位数据,也可以操作32位数据。( )
- FMOV是多点传送指令。( )
- BMOV指令的作用是取反传送。( )
- DCMPP指令的功能是16位比较指令的连续执行方式。( )
- FOR不属于循环指令。( )
- 主程序结束指令的助记符是END。( )
- FX2N系列PLC设置有9个个中断源。( )