

可编程序控制器原理与应用理论试卷八
单位___________ 姓名___________ 班级____________
注 意 事 项
- 本试卷依据课程标准命制,考试时间:120分钟。
- 请在试卷相应位置上填写姓名、准考证号和所在单位的名称,并用2B铅笔填涂答题卡上的相应位置处。
- 考试结束后,考生务必将上交试卷和答题卡。
- 答卷必须用蓝色或黑色钢笔、圆珠笔,不许用铅笔或红笔。
- 考试应按要求作答,如不按要求进行作答,一律视为作答无效。
| 一 | 二 | 总分 |
得分 |
|
|
|
- 选择题(请将正确答案的代号填入括号内,每题1分,共80分)
- 下列关于功能指令的操作码,说法错误的选项是( )
A.能指令的操作码表达了该指令做什么
B.为了便于记忆,每个功指令都有一个助记符
C.在编程器或FXGP软件中输入功能指令时,输入的是功能号FNC45,显示的却是助记符MEAN
D.FXGP软件中不能直接输入助记符,输入的是功能号。
- 下列关于功能指令的要素,说法错误的选项是( )
A.功能指令的执行形式分为脉冲执行方式和连续执行方式两种类型。
B.功能指令的数据长度可分为16位和32位两种类型
C.一般来说,功能指令的功能号和助记符占两步程序步
D.一般来说,16位功能指令占7步程序步,32位功能指令占13步程序。
- 下列关于连续执行型指令和脉冲执行型指令说法错误的是( )
A.连续执行型指令在每个扫描周期都重复执行一次
B.脉冲执行型指令只在信号OFF→ON时执行一次
C.脉冲执行型指令在指令后面加符号 “P”来表示。
D.脉冲执行型指令只在信号ON→OFF时执行一次
- 下列关于跳转指令说法正确的选项是( )
A.CJ和CJ(P)指令占2步程序步,标号P占1步程序步
B.跳转指令的功能是当跳转条件成立时跳过一段指令,跳转至指令中所标明的标号处继续执行。
C.跳转指令的指令编号是FNC01
D.CJ指令的目标元件是指针标号,其范围是P0—P32(允许变址修改)
- 中断指令不包括( )
A.IRET
B.EI
C.DI
D.FEND
- 下列关于主程序结束指令说法错误的选项是( )
A.主程序结束指令指令是一步指令,无操作目标元件
B.程序应写在FEND指令和END指令之间,包括CALL,CALL(P)指令对应的标号、子程序和中断子程序;
C.使用多个主程序结束指令的情况下,应在最后的主程序结束指令与END指令之间编写子程序或中断子程序
D.程序中必须使用主程序结束指令
- 下列关于循环指令说法错误的选项是( )
A.FOR和NEXT指令必须成对使用
B.只有在FOR~NEXT指令之间的程序(利用源数据指定的次数)执行几次后,才处理NEXT指令以后的一步;
C.循环次数范围为n=1~32767时有效
D. 如循环次数<1时,被当作0处理,不执行循环;
- 下列关于比较指令,说法错误的选项是( )
A.CMP指令可以比较两个16位二进制数,也可以比较两个32位二进制数
B.CMP指令也可以有脉冲操作方式,使用后缀(P)
C.指令编号及助记符:FNC10 CMP[S1·][S2·][D·]
D.若D·=M0,则当S1=S2时,M1=0
- 下列关于区间比较指令的说法错误的是( )
A.区间比较指令编号及助记符:FNC11 ZCP[S1·][S2·] [S3·] [D·]
B.ZCP是将一个数据[S]与两个源数据[S1]和[S2]间的数据进行代数比较,比较结果在目标操作数[D]及以后的两个软元件中表示出来。
C.源[S1]的内容比源[S2]的内容要小,如果[S1]比[S2]大,则比较结果无效。
D.区间比较指令的比较过程中,源数据的比较是代数比较。
- DMOVP指令的功能是( )
A.16位数据传送指令的连续执行方式
B.16位数据传送指令的脉冲执行方式
C.32位数据传送指令的连续执行方式
D.32位数据传送指令的脉冲执行方式
- BMOV指令的作用是( )
A.点对点传送指令
B.单一传送指令
C.块传送指令
D.取反传送指令
- 数据交换指令是( )
A.FMOV
B.SMOV
C.XCH
D.CPL
- 乘法指令的助记符是( )A.ADD
B.SUB
C.MUL
D.DIV
- 加1指令助记符是( )
A、DADD
B、DDIV
C、INC
D、DEC
- 对案列程序解析正确的选项是( )

A.当X0由OFF→ON变化时,由[D]指定的元件D10中的二进制数自动减1;
B.当X0由ON→OFF变化时,由[D]指定的元件D10中的二进制数自动加1;
C.若用连续指令时,每个扫描周期加1;
D.若用连续指令时,加1只执行一个扫描周期。
- 对案列程序解析正确的选项是( )

A.当X0由OFF→ON变化时,由[D]指定的元件D10中的二进制数自动加1;
B.当X0由ON→OFF变化时,由[D]指定的元件D10中的二进制数自动减1;
C.若用连续指令时,每个扫描周期减1;
D.若用连续指令时,减1只执行一个扫描周期。
- 下列关于逻辑字与指令说法错误的是( )
A.逻辑字与指令的功能是将指定两源元件中数,进行二进制按位“与”,然后将相“与”结果送入指定的目软元件中。
B.逻辑字与指令的指令编码是FNC27
C.逻辑字与指令前面的“W”表示16位字操作
D.DWANDP指令是双字与指令的脉冲执行方式
- WOR指令是( )
A.逻辑与
B.逻辑字与
C.逻辑或
D.逻辑字或
- 下列关于WOR指令,说法错误的选项是( )
A.WORD指令的功能是将指定的两个源元件中的数,进行二进制按位“或”,然后将相“或”结果送入指定的目标元件中。
B.WOR前面的“W”表示32位字操作
C.WOR指令操作16位数据,DWOR指令操作32位数据
D.WORP指令是WOR指令的脉冲执行方式。
- 下列关于异或指令说法错误的选项是( )
A.异或指令的功能是将指定的两个源软元件中的数,进行二进制按位“异或”,然后将相“异或”结果送入指定的目元件中。
B.“异或”运算可以理解为不考虑进位的按位减法运算
C.异或指令可以分为16位数据操作指令和32位数据操作指令两种形式。
D.异或指令可以分为连续执行方式和脉冲指令方式两种形式
- NEG指令是( )
A.异或指令
B.译码指令
C.求补指令
D.同或指令
- 位组件左移指令SFTL的指令编号是( )
A.FNC35
B.FNC34
C.FNC33
D.FNC32
- 字右移指令结构表达式:FNC36 WSFR(P) [S·][D·] n1 n2,下列说法错误的是( )
A.[S·]为移位的源字元件首地址,源操作数可取KnX、KnY、KnM、KnS、T、C和D
B.[D·]为移位的目标字元件首地址,目标操作数可取KnY、KnM、KnS、T、C和D;
C.n1为目标字元件个数,n2为源字元件移位个数;
D.n1,n2 可取K(十进制)
- SFRD是( )指令
A.先进先出控制的数据读出指令
B.后进先出控制的数据读出指令
C.后进后出控制的数据写入指令
D.先进先出控制的数据写入指令
- SFRD指令的指令结构表达式: FNC39 SFRD(P)[S·][D·] n,下列说法错误的选项是( )
A.SFRD指令的结构表达式中,n可以取K(十进制),也可以取H(十六进制)
B. SFRD指令的结构表达式中,n的取值范围:2≤ n≤256
C.SFRD指令只能操作16位数据。
D.SFRDP是SFRD指令的脉冲执行方式,占7步程序步
- 很多机电设备都需要设置初始位置,当设备中的相关部件不在( )时,设备就不能启动运行。
A、任意位置
B、终点位置
C、初始位置
D、运动位置
- 为了保证设备和人身安全,机电设备必须设置初始位置,它是设备或装置运行的( )。
A、起点
B、终点
C、中点
D、圆点
- FX系列PLC中,位右移指令应用( )
A、DADD B、DDIV C、SFTR D、SFTL
- FX系列PLC中,位左移指令应用( )
A、DADD B、DDIV C、SFTR D、SFTL
- T0~T199是归类于( )
A、100 ms普通定时器 B、10 ms普通定时器
C、1ms累计定时器 D、100 ms累计定时器
- T200~T245是归类于( )
A、100 ms普通定时器 B、10 ms普通定时器
C、1ms累计定时器 D、100 ms累计定时器
- 步进电机是利用电磁原理将电脉冲信号转换成( )信号。
A.电流 B.电压 C. 位移 D.功率
- 参数设定时的确定是按面板的( )键
A、RUN B、SET C、MODE D、STOP
- YL-235A物料传送及分拣机构由( )及分拣系统两部分组成。
A、分拣识别、皮带识别
B、物料识别、皮带识别
C、分拣系统、物料识别
D、皮带输送、物料识别
- 根据传感器的输出方式,传感器可以分为( )输出型和( )输出型两种类型。
A、PNP NPN
B、APN NPN
C、NPN FPN
D、CPN NPN
- 气动机械手的气缸部分由悬臂气缸、手臂气缸、( )和旋转气缸组成。
A、手爪气缸 B、气缸 C、移动气缸 D以上都是
- 字左移指令结构表达式:FNC37 WSFL(P) [S·][D·] n1 n2,下列说法错误的是( )
A.[S·]为移位的源字元件首地址,源操作数可取KnX、KnY、KnM、KnS、T、C和D
B.[D·]为移位的目标字元件首地址,目标操作数可取KnY、KnM、KnS、T、C和D;
C.n1为目标字元件个数,n2为源字元件移位个数,n1,n2 可取K(十进制)、H(十六进制)
D.n1和n2的关系为n1≤n2≤512
- 按照输出电压调节方式,变频器可以分为PAM和( )
A:PWM B:电流型 C:电压型 D:和矢量控制
- 变频器种类很多,其中按滤波方式可分为电压型和( )型。
A:电流 B:电阻 C:电感 D:电容
- 三相异步电动机的转速除了与电源频率、转差率有关,还与( )有关系。
A:磁极数 B:磁极对数 C:磁感应强度 D:磁场强度
- 变频器的运行操作键“RUN”中文的意思是( )。
A:正转 B:反转 C:停止 D:运行
- 变频器的运行操作键“STOP”中文的意思是( )。
A:正转、 B:反转 C:停止 D:暂停
- ( )是外部运行选择模式参数。
A:Pr.79.0 B:Pr.79.1 C:Pr.79.2 D:Pr.79.4
- 采用电位器操作电机时,变频器的运行模式为( )
A、外部 B、网络 C、PU
- 带式输送机负载转矩属于( )。
A.恒转矩负载 B.恒功率负载 C.二次方律负载 D.以上都不是
- 设定点动运行频率的参数是( )
A、P1 B、P79 C、P15 D、P16
- 步进电动机,又称电脉冲马达,是通过( ) 决定转角位移的一种伺服电动机。
A 脉冲的宽度 B 脉冲的数量 C 脉冲的相位 D 脉冲的占空比
- 在步进电动机的PLC控制案例中,采用( )指令实现电动机正反转和调速控制。
A.移位指令
B.传送指令
C.译码指令
D.编码指令
- OR指令的作用是:( )
A. 用于单个常开触点与前面的触点串联连接
B. 用于单个常闭触点与上面的触点并联连接
C. 用于单个常闭触点与前面的触点串联连接
D. 用于单个常开触点与上面的触点并联连接
- 电流继电器的符号:( )
A. KM B.KV C. KT D. KA
- 电压继电器的符号( )
A. KM B.KV C. KT D. KA
- 送料机构的驱动电机驱动电压是( )
A.AC 220
B.AC 380V
C.DC 24V
D.DC 220V
- PLC通过控制电磁阀实现对( )的控制,从而完成机械手的工作。
A.气缸
B.电磁阀
C.传感器
D.电动机
- 磁性传感器又称为磁性开关,是一种利用磁场信号来控制的线路开关器件,也叫( )
A.按钮
B.开关
C.磁控开关
D.磁感器
- 光电传感器是采用光电元件作为检测元件的传感器,通过把光强度的变化转换成( )的变化来实现控制的
A.电信号
B.能量
C.电量
D.非电量
- 双电控电磁阀用左右两侧的驱动线圈分别控制气缸伸出与缩回,两侧线圈不能同时( )。
A.动作
B.接反
C.失电
D.得电
- 自锁型按钮一般是指按钮自带机械锁定功能,按下去,松手后按钮是不会跳起来的,处于锁定状态,需要再按( A )次,才能解锁复位。
A、一 B、二 C、三 D、四
- ( )又称组合开关。
A、按钮开关 B、转换开关 C、行程开关 D、隔离开关
- 下列选项中关于YL-235A气动机械手的控制的说法错误的是( )
A. 机械手是一种能模仿人手和手臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
B. 机械手不是是最早出现的工业机器人,也不是最早出现的现代机器人。
C. 机械手可以代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。
D.机械手广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
- 如下图所示的JZ150型混凝土搅拌机PLC控制梯形图所示,分析错误的选项是( )
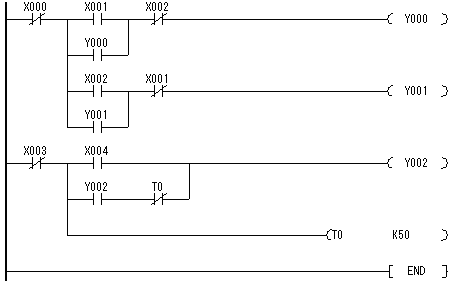
A.X000是搅拌电机的停止信号
B.X001是搅拌电机的正转启动信号
C.X002是搅拌电机的反转启动信号
D.搅拌机启动后,水泵电机持续运行,直到按下停止按钮。
- 如下图所示的电动葫芦控制程序中,分析正确的选项是( )
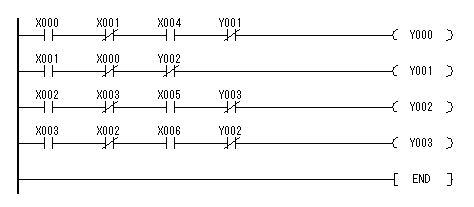
A.X004输入继电器外接的是上升限位开关的常闭触点,否则Y000无法得电
B.X005输入继电器外接的是左限位开关的常开触点,否则Y002无法得电
C.X006输入继电器外接的是右限位开关的常开触点,否则Y003无法得电
D.当X001常开触点闭合时,电动葫芦上升
- 如下图所示的梯形图程序,下列分析错误的选项是( )
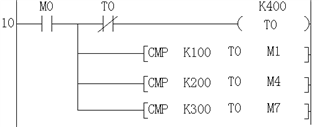
A.当M0常开触点闭合时,该程序循环执行
B.当T0=100时,M1=1
C.当T0=200时,M5=1
D.当T0=300时,M8=1
- 如下图所示的梯形图程序,下列分析错误的选项是( )
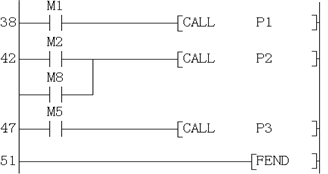
A.该程序是一个主控程序,在执行过程中需要调用3个子程序
B.当M1=1时,调用子程序P1
C.当M5=1时,调用子程序P3
D.FEND是程序结束指令
- 下图所示的梯形图程序,分析错误的选项是( )

A.当X000=1且当K100>C20时,M0=1,Y000=1
B.当X000=1且当K100≤C20≤K200时,M1=1,Y001=1
C.当X000=1且当C20>K200时,M2=1,Y002=1
D.当X000=1且当C20<K200时,M2=1,Y002=1
- 在乒乓球比赛案例中,下列梯形图程序的作用是( )
![]()
A.M8000在通电后RUN模式时一直保持ON
B.PLC进入RUN模式后,Y000~Y007表示的8位二进制数等于0时,M11=1
C.PLC进入RUN模式后,Y000~Y007表示的8位二进制数大于0时,M10=1
D.该梯形图程序中,比较指令在每个扫描周期均执行一次。
- 下图所示的梯形图程序,分析错误的选项是( )

A.X000常开触点由断开到闭合时,MOVP指令将D0中的数据传送到D20中。
B.X000常开触点由闭合到断开时,MOVP指令将D0中的数据传送到D20中。
C.X000常开触点闭合时,常数K200被传送到D30中
D.X000常开触点闭合时,每个扫描周期均执行一次K200→D30
- 如下图所示的梯形图程序,说法错误的选项是( )
![]()
A.X000常开触点闭合时,移位传送指令发生作用
B.X000常开触点闭合时,将D1中第4位开始的2个数移位到D2中第3位开始的2个位置上去。
C.移位传送指令一般用于多位BCD拨盘开关的数据输入。
D.移位传送指令的编号及助记符:FNC13 SMOV [S·] m1 m2 [D·] n,其中,m1、m2、n的取值范围为0~8
- 如下图所示的梯形图程序,下列说法正确的是( )
![]()
A.X000常开触点断开时,CML指令发生作用
B.CML指令执行时,首先将D0中的8位数据按位取反
C.CML指令执行时,将D0中的数据取反后送到K4Y000中
D.K4Y000表示以Y000为最低位的8位目标元件
- 如下图所示的梯形图程序,选项中错误的是( )
![]()
A.当X000常开触点闭合时,D5中的数据传送到D10中
B.当X000常开触点闭合时,D6中的数据传送到D11中
C.当X000常开触点闭合时,D7中的数据传送到D12中
D.当X000常开触点闭合时,D8中的数据传送到D13中
- 下图所示的梯形图控制程序中,执行结果正确的选项是( )
![]()
A.X000常开触点闭合时,D5中的数据被传送到D10中。
B.X000常开触点闭合时,D6中的数据被传送到D11中。
C.X000常开触点闭合时,D7中的数据被传送到D12中。
D.X000常开触点闭合时,D8中的数据被传送到D13中。
- 关于下列梯形图,说法正确的选项是( )
![]()
A.该程序中,使用了数据交换指令的连续执行方式
B.当X000常开触点断开时,执行数据交换指令
C.该程序中,操作数为32位数据
D.该程序的执行结果是,D10中的数据传送到D20中,D20中原有数据传送到D10中,相当与两个数据寄存器互换数据。
- 如下图所示的抢答器控制案例程序中,分析正确的选项是( )
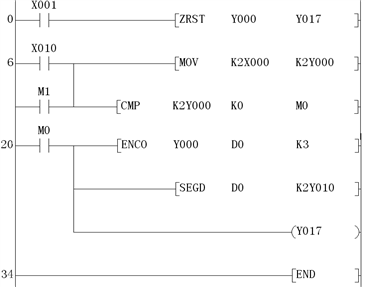
A.X001常开触点闭合时,Y000和Y017输出继电器复位。
B.X010常开触点闭合时,X000~X007组成的8位二进制数据被传送到Y000~Y007中。
C.X010常开触点闭合时,当Y000~Y007组成的8位二进制数据等于0时,M0=1
D.SEGD是译码指令
- 如下图所示的梯形图程序,下列分析正确的选项是( )

A.X2=1,D0中的数据加10
B.X2=1,D0中的数据减10
C.X2=1,D0中的数据加1
D.X2=1,D0中的数据减1
- 下图所示的梯形图程序分析正确的是( )
![]()
A.X000闭合时,D10中的数据与D30中的数据按位相与,并将结果存放在D20中
B.X000闭合时,D20中的数据与D30中的数据按位相与,并将结果存放在D10中
C.X000由断开到闭合时,D50中的数据与D60中的数据按位相与,将结果存放在D40中
D.X000由断开到闭合时,D40中的数据与D50中的数据按位相与,将结果存放在D60中
- 如下图所示的梯形图程序,分析正确的选项是( )
![]()
A.若D10=10,D20=5,则当X000常开触点闭合时,D30=15
B.若D10=10,D20=1,则当X000常开触点闭合时,D30=0
C.若D40=15,D50=31,则当X000常开触点闭合时,D60=16
D.若D40=15,D50=31,则当X000常开触点闭合时,D60=32
- 下图所示梯形图程序中,若初始时D0=2#1111111100000000,则下列分析中正确的是( )
![]()
A.X000由0→1时,D0=2#0000111111110000
B.X000由0→1时,M8022=1
C.X000由0→1时,D0=2#0000011111111000
D.X000由0→1时,D0=2#1111000000001111
- 下图所示的梯形图程序,若初始时D0=2#1111111100000000,则下列说法正确的选项是( )
![]()
A.程序执行结果:D0=2#111111110000
B.程序执行结果:D0=2#1111000000001111
C.程序执行结果:D0=2#0000000011111111
D.程序执行结果:D0=2#1100110011000011
- 下图所示的梯形图程序,若初始时D0=2#1111111100000000,则分析正确的选项是( )
![]()
A.程序的执行结果:D0=2#1111000000001111,M8022=1
B.程序的执行结果:D0=2#0000111100001111,M8022=0
C.程序的执行结果:D0=2#0000000011111111,M8022=1
D.程序的执行结果:D0=2#0000111111110000,M8022=0
- 如下图所示梯形图程序,下列分析错误的选项是( )
![]()
A.当X10由OFF→ON时,M0~M15中的各位数据向右移4位
B.当X10由OFF→ON时,X0~X3中的4位数据移入M12~M15中。
C.当X10由OFF→ON时,M0~M3中的4位数据从低位端溢出
D.当X10由OFF→ON时,M7~M3中的4位数据移入M3~M0中。
- 如下图所示的彩灯控制案例的梯形图程序,分析错误的选项是( )
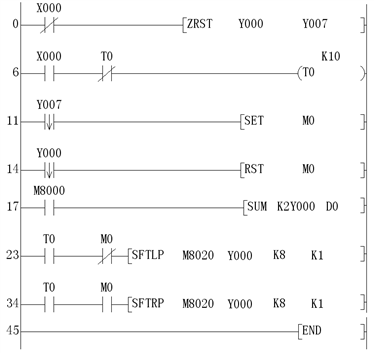
A . 初始状态下:控制开关S断开,X0常闭接点闭合,Y7~Y0均为0,执行SUM指令,D0=0所以零位标志M8020=1。
B. 当控制开关S断开,Y7~Y0全部复位为0。
C. 闭合控制开关, T0每隔2s发出一个脉冲
D. T0的脉冲控制右移指令SFTRP,Y7~Y0实现从Y7→Y0单点右移。
- 判断题(正确的在括号内打“√”,错误的在括号内打“×”,每题1分,共20分)
- AND指令的作用是用于单个常闭触点与前面的触点串联连接。( )
- 减1指令助记符是DEC。( )
- SFWR指令的结构表达式:FNC38 SFER(P)[S·][D·] n。( )
- SFWR指令的结构表达式中,n的取值范围:2≤ n≤512。( )
- SFWR指令可以操作16位数据,也可以操作32位数据。( )
- NEG指令的指令编号是FNC29。( )
- NEG指令执行时占3步程序步,DNEG指令执行时占6步程序步。( )
- 传送指令 MOV 是将源操作数内的数据传送到指定的目标操作数内。( )
- 传送指令只可以传送16位数据。( )
- 传送指令不可以传送32位数据。( )
- BMOV指令的功能是将源数据中的n个数据组成的数据块传送到指定的目中去。( )
- BMOV指令执行过程中,如果元件号超出允许元件号的范围,数据仅传送到允许范围内。( )
- 块传送指令编号及助记符:FNC15 BMOV [S·][D·] n,其中,n代表数据块个数( )。
- BMOV指令执行过程中,传送顺序只能从低元件号开始。( )
- 数据交换指令的功能是将数据在两个指定的目标软组件之间进行交换。( )
- 数据交换指令的脉冲执行方式在执行过程中,数据在每个扫描周期交换1次( )
- 数据交换指令可以操作16位数据,不可以操作32位数据。( )
- 数据交换指令操作32位数据时,占用5步程序步。( )
- 字右移指令可以操作16位数据,也可以操作32位数据。( )
- 字右移指令的指令编号是FNC36。( )