

可编程序控制器原理与应用理论试卷六
单位___________ 姓名___________ 班级____________
注 意 事 项
- 本试卷依据课程标准命制,考试时间:120分钟。
- 请在试卷相应位置上填写姓名、准考证号和所在单位的名称,并用2B铅笔填涂答题卡上的相应位置处。
- 考试结束后,考生务必将上交试卷和答题卡。
- 答卷必须用蓝色或黑色钢笔、圆珠笔,不许用铅笔或红笔。
- 考试应按要求作答,如不按要求进行作答,一律视为作答无效。
| 一 | 二 | 总分 |
得分 |
|
|
|
- 选择题(请将正确答案的代号填入括号内,每题1分,共80分)
- 日本三菱FX2N 系列PLC属于( )PLC
A.第一代
B.第二代
C.第三代
D.第四代
- 其中,MOVP指令的作用是( )
A.移位指令
B.数码显示指令
C.传送指令
D.传送指令的脉冲执行方式
- EGD指令的作用是( )
A.移位指令
B.数码显示指令
C.传送指令
D.传送指令的脉冲执行方式
- M8002辅助继电器的作用是( )
A.提供10ms周期脉冲
B.提供100ms周期脉冲
C.提供1 min周期脉冲
D.初始脉冲(仅在运行开始时瞬间接通)
- ZRST指令的作用是( )
A.置位
B.复位
C.成批复位
D.成批置位
- 功能指令的组成部分不包括( )
A.操作码
B.操作数
C.执行条件
- 功能指令的操作数部分由三部分组成,不包括( )
A . 源操作数(源);
B . 助记符
C . 数据个数;
D . 目标操作数(目)
- 1个双字元件由( )位存储单元构成
A.16位
B.8位
C.32位
D.64位
- M0~M7八个辅助继电器用位组合的方式表达为( )
A .K2M7
B.K1M0
C.K2M0
D .K3M7
- 下列关于连续执行型指令和脉冲执行型指令说法错误的是( )
A.连续执行型指令在每个扫描周期都重复执行一次
B.脉冲执行型指令只在信号OFF→ON时执行一次
C.脉冲执行型指令在指令后面加符号 “P”来表示。
D.脉冲执行型指令只在信号ON→OFF时执行一次
- 下列关于变址寄存器说法错误的选项是( )
A.变址的方法是将变址寄存器V和Z这两个16位的寄存器放在各种寄存器的后面,充当操作数地址的偏移量;
B.操作数的实际地址就是寄存器的当前值以及V和Z内容相加后的和;
C.对32位数据进行变址操作时,要将V、Z组合成32位(V,Z)来使用,这时Z为高16位, V为低16位;
D.可以用变址寄存器进行变址的软元件是X、Y、M、S、P、T、C、D、K、H、KnX、KnY、KnM。
- 跳转指令的助记符是( )
A.CJ
B.CALL
C.SRET
D.IRET
- 脉冲执行型子程序调用指令的助记符是( )
A.CALL
B.CALL(P)
C.SRET
D.ZRST
- 中断指令不包括( )
A.IRET
B.EI
C.DI
D.FEND
- FX2N系列PLC设置有( )个中断源
A.6个
B.7个
C.8个
D .9个
- 下列关于中断指令说法错误的选项是( )
A . FX2N系列PLC有两类中断,即外部中断和内部定时器中断 ;
B . 定时中断是内部中断,是定时器定时时间到引起的中断;
C . 程序中允许中断响应的区间应该由EI指令开始,IRET指令结束;
D .在中断子程序执行区间之外时,即使有中断请求,CPU也不会立即响应。
- 主程序结束指令的助记符是( )
A.END
B.FEND
C.ZRST
D.CALL
- 若不想执行FOR~NEXT间的程序时,利用( )
A.CJ指令,使之跳转
B.CALL指令,使之调用其他子程序
C.END指令,使程序结束
D.FEND指令,结束主程序
- DCMPP指令的功能是( )
A . 16位比较指令的连续执行方式
B . 16位比较指令的脉冲执行方式
C . 32位比较指令的连续执行方式
D . 32位比较指令的脉冲执行方式
- CMP指令的比较结果有三种,下列( )不属于CMP比较指令的比较结果。
A.大于
B.等于
C.不等于
D.小于
- 下列关于比较指令,说法错误的选项是( )
A.CMP指令可以比较两个16位二进制数,也可以比较两个32位二进制数
B.CMP指令也可以有脉冲操作方式,使用后缀(P)
C.指令编号及助记符:FNC10 CMP[S1·][S2·][D·]
D.若D·=M0,则当S1=S2时,M1=0
- DMOVP指令的功能是( )
A.16位数据传送指令的连续执行方式
B.16位数据传送指令的脉冲执行方式
C.32位数据传送指令的连续执行方式
D.32位数据传送指令的脉冲执行方式
- 移位传送指令是( )
A.SMOV
B.MOV
C.MOVP
D.DMOVP
- BMOV指令的作用是( )
A.点对点传送指令
B.单一传送指令
C.块传送指令
D.取反传送指令
- FMOV指令是( )
A.取反传送指令
B.多点传送指令
C.块传送指令
D.移位传送指令
- 数据交换指令是( )
A.FMOV
B.SMOV
C.XCH
D.CPL
- 关于数据交换指令,下列说法错误的选项是( )
A.数据交换指令的功能是将数据在两个指定的目标软组件之间进行交换。
B.数据交换指令的脉冲执行方式在执行过程中,数据在每个扫描周期交换1次 。
C.数据交换指令可以操作16位数据,也可以操作32位数据
D.数据交换指令操作32位数据时,占用5步程序步
- BCD变换指令的功能是( )
A.将指定软元件的内容转换成BCD码并送到指定的目软元件中去。
B.将制定目标元件中的数据转换成BCD码
C.将指定软元件的BCD码转换成二进制数并送到指定的目软元件中去。
D.将制定目标元件中的数据转换成二进制数
- 下列关于BCD变换指令,说法错误的是( )
A.BCD变换指令有连续执行和脉冲执行两种指令形式
B.BCD变换指令可操作16位数据和32位数据
C.BCD变换指令操作16位数据时,数据范围是0~32767
D.BCD变换指令操作32位数据时,数据范围是0~99999999
- BIN变换指令的功能是( )
A.将指定软元件中的BCD码转换成二进制数并送到指定的目软元件中去
B.将指定软元件中的BIN码转换成BCD码并送到指定的目软元件中去
C.将指定软元件中的BIN码转换成二进制数
D.将指定软元件中的二进制数转换成BIN码
- 下列关于BIN变换指令,说法错误的是( )
A.BIN变换指令与BCD变换指令的功能刚好相反。
B.DBINP指令的操作数是32位数据
C.BINP指令的操作数是16位数据,该指令为脉冲执行方式。
D.BIN指令占用9步程序步。
- 下列关于加法指令标志位说法正确的选项是( )
A.相加和=0,零标志位M8020=1;
B.若发生进位,即运算结果超过32,则进位标志位M8022=0;
C.若发生借位,即运算结果大于-32767(16位运算),则借位标志M8021=1。
D.若浮点数标志位M8023置0,则可进行浮点加法运算。
- 减法指令的助记符是( )
A.ADD
B.SUB
C.MUL
D.DIV
- 下列关于减法指令标志位说法正确的选项是( )
A.相减结果为0,零标志位M8020=1;
B.相减发生借位,借位标志M8021=0;
C.若相减发生进位,进位标志M8022=0。
D.若将浮点数标志位M8023置1,则可以进行浮点数加法运算。
- 乘法指令的助记符是( )
A.ADD
B.SUB
C.MUL
D.DIV
- 加1指令助记符是( )
A、DADD
B、DDIV
C、INC
D、DEC
- 三菱FX2N系列PLC中有( )逻辑运算指令
A.2条
B.4条
C.6条
D.8条
- 下列关于逻辑字与指令说法错误的是( )
A.逻辑字与指令的功能是将指定两源元件中数,进行二进制按位“与”,然后将相“与”结果送入指定的目软元件中。
B.逻辑字与指令的指令编码是FNC27
C.逻辑字与指令前面的“W”表示16位字操作
D.DWANDP指令是双字与指令的脉冲执行方式
- WOR指令是( )
A.逻辑与
B.逻辑字与
C.逻辑或
D.逻辑字或
- 下列异或逻辑运算结果错误的是( )
A.1异或1结果为1
B.1异或0结果为1
C.0异或1结果为1
D.0异或0结果为0
- NEG指令是( )
A.异或指令
B.译码指令
C.求补指令
D.同或指令
- 左循环移位指令是( )
A.ROL
B.ROR
C.RCL
D.RCR
- FX2N系列PLC中,共有( )条循环移位指令
A.2
B.4
C.6
D.8
- 循环移位指令影响的特殊辅助继电器是( )
A.M8021
B.M8022
C.M8023
D.M8025
- 下列关于位组件右移指令,说法错误的是( )
A.位组件右移指令的指令编号是FNC34
B.位组件右移指令的目操作数为Y、M、S;
C.SFTR、SFTRP指令占9步程序步。
D.位组件右移指令可以操作16位数据,也可以操作32位数据
- SFWR是( )指令
A.先进后出控制的数据写入指令
B.后进先出控制的数据写入指令
C.后进后出控制的数据写入指令
D.先进先出控制的数据写入指令
- 下列关于SFWR指令,说法错误的选项是( )
A.SFWR指令的结构表达式:FNC38 SFER(P)[S·][D·] n
B. SFWR指令的结构表达式中,n的取值范围:2≤ n≤512
C.SFWR指令可以操作16位数据,也可以操作32位数据。
D.SFWRP是SFWR指令的脉冲执行方式,占7步程序步。
- SFRD是( )指令
A.先进先出控制的数据读出指令
B.后进先出控制的数据读出指令
C.后进后出控制的数据写入指令
D.先进先出控制的数据写入指令
- 触摸屏作为一种最新的电脑输入设备,它是目前( )的一种人机交互方式。
A.最简单
B.最方便
C.最自然
D.以上都是
- 在变频器参数设置中,按MODE键 ,( )
A.读取当前设定值
B. 进入参数设定模式
C. 确定,保存设置
D. 进入PU 运行模式
- 变频器M旋钮用于( )
A、改变频率、参数的数值
B、顺时针增大数值,逆时针减少数值。
C、参数的数值,顺时针增大数值
D、改变频率、参数的数值,顺时针增大数值,逆时针减少数值。
- 变频器的运行操作键“RUN”中文的意思是( )。
A:正转 B:反转 C:停止 D:运行
- 变频器的运行操作键“STOP”中文的意思是( )。
A:正转、 B:反转 C:停止 D:暂停
- ( )是外部运行选择模式参数。
A:Pr.79.0 B:Pr.79.1 C:Pr.79.2 D:Pr.79.4
- 进电动机,又称电脉冲马达,是通过( ) 决定转角位移的一种伺服电动机。
A 脉冲的宽度 B 脉冲的数量 C 脉冲的相位 D 脉冲的占空比
- 步进电机是利用电磁原理将电脉冲信号转换成( )信号。
A.电流 B.电压 C. 位移 D.功率
- 下列关于步进电机,说法错误的选项是( )
A.步进电动机由定子和转子两大部分组成。
B.步进电机的定子由硅钢片叠装而成,一般装有2~6相绕组转子用硅钢片叠装成有齿铁芯或用软磁材料做成凸极结构。
C.步进电机的转子本身没有励磁绕组的称为反应式步进电动机
D.反应式步进电机比(感应子式)步进电动机应用广泛。
- 在步进电动机的PLC控制案例中,采用( )指令实现电动机正反转和调速控制。
A.移位指令
B.传送指令
C.译码指令
D.编码指令
- 如下图所示程序,当V=8,Z=14时该程序的执行结果是( )
![]()
A.将D13中的数据传送到D24中
B.将D24中的数据传送到D13中
C.将D19中的数据传送到D18中
D.将D18中的数据传送到D19中
- 如下图所示的梯形图程序,下列分析错误的选项是( )
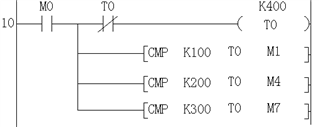
A.当M0常开触点闭合时,该程序循环执行
B.当T0=100时,M1=1
C.当T0=200时,M5=1
D.当T0=300时,M8=1
- 如下图所示的梯形图程序,下列分析错误的选项是( )
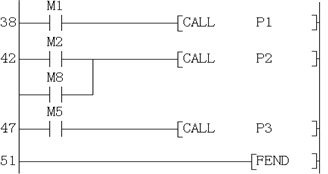
A.该程序是一个主控程序,在执行过程中需要调用3个子程序
B.当M1=1时,调用子程序P1
C.当M5=1时,调用子程序P3
D.FEND是程序结束指令
- 下图所示的梯形图程序,分析错误的选项是( )

A.当X000=1且当K100>C20时,M0=1,Y000=1
B.当X000=1且当K100≤C20≤K200时,M1=1,Y001=1
C.当X000=1且当C20>K200时,M2=1,Y002=1
D.当X000=1且当C20<K200时,M2=1,Y002=1
- 下图所示的梯形图程序,分析错误的选项是( )

A.X000常开触点由断开到闭合时,MOVP指令将D0中的数据传送到D20中。
B.X000常开触点由闭合到断开时,MOVP指令将D0中的数据传送到D20中。
C.X000常开触点闭合时,常数K200被传送到D30中
D.X000常开触点闭合时,每个扫描周期均执行一次K200→D30
- 如下图所示的梯形图程序,说法错误的选项是( )
![]()
A.X000常开触点闭合时,移位传送指令发生作用
B.X000常开触点闭合时,将D1中第4位开始的2个数移位到D2中第3位开始的2个位置上去。
C.移位传送指令一般用于多位BCD拨盘开关的数据输入。
D.移位传送指令的编号及助记符:FNC13 SMOV [S·] m1 m2 [D·] n,其中,m1、m2、n的取值范围为0~8
- 如下图所示的梯形图程序,下列说法正确的是( )
![]()
A.X000常开触点断开时,CML指令发生作用
B.CML指令执行时,首先将D0中的8位数据按位取反
C.CML指令执行时,将D0中的数据取反后送到K4Y000中
D.K4Y000表示以Y000为最低位的8位目标元件
- 如下图所示的梯形图程序,选项中错误的是( )
![]()
A.当X000常开触点闭合时,D5中的数据传送到D10中
B.当X000常开触点闭合时,D6中的数据传送到D11中
C.当X000常开触点闭合时,D7中的数据传送到D12中
D.当X000常开触点闭合时,D8中的数据传送到D13中
- 下图所示的梯形图控制程序中,执行结果正确的选项是( )
![]()
A.X000常开触点闭合时,D5中的数据被传送到D10中。
B.X000常开触点闭合时,D6中的数据被传送到D11中。
C.X000常开触点闭合时,D7中的数据被传送到D12中。
D.X000常开触点闭合时,D8中的数据被传送到D13中。
- 关于下列梯形图,说法正确的选项是( )
![]()
A.该程序中,使用了数据交换指令的连续执行方式
B.当X000常开触点断开时,执行数据交换指令
C.该程序中,操作数为32位数据
D.该程序的执行结果是,D10中的数据传送到D20中,D20中原有数据传送到D10中,相当与两个数据寄存器互换数据。
- 对案列程序解析正确的选项是( )

A.当X0由OFF→ON变化时,由[D]指定的元件D10中的二进制数自动减1;
B.当X0由ON→OFF变化时,由[D]指定的元件D10中的二进制数自动加1;
C.若用连续指令时,每个扫描周期加1;
D.若用连续指令时,加1只执行一个扫描周期
- 对案列程序解析正确的选项是( )

A.当X0由OFF→ON变化时,由[D]指定的元件D10中的二进制数自动加1;
B.当X0由ON→OFF变化时,由[D]指定的元件D10中的二进制数自动减1;
C.若用连续指令时,每个扫描周期减1;
D.若用连续指令时,减1只执行一个扫描周期。
- 如下图所示的梯形图程序,下列分析正确的选项是( )

A.X2=1,D0中的数据加10
B.X2=1,D0中的数据减10
C.X2=1,D0中的数据加1
D.X2=1,D0中的数据减1
- 如下图所示的梯形图程序,分析正确的选项是( )
![]()
A.若D10=10,D20=5,则当X000常开触点闭合时,D30=15
B.若D10=10,D20=1,则当X000常开触点闭合时,D30=0
C.若D40=15,D50=31,则当X000常开触点闭合时,D60=16
D.若D40=15,D50=31,则当X000常开触点闭合时,D60=32
- 下图所示梯形图程序中,若初始时D0=2#1111111100000000,则下列分析中正确的是( )
![]()
A.X000由0→1时,D0=2#0000111111110000
B.X000由0→1时,M8022=1
C.X000由0→1时,D0=2#0000011111111000
D.X000由0→1时,D0=2#1111000000001111
- 下图所示的梯形图程序,若初始时D0=2#1111111100000000,则下列说法正确的选项是( )
![]()
A.程序执行结果:D0=2#111111110000
B.程序执行结果:D0=2#1111000000001111
C.程序执行结果:D0=2#0000000011111111
D.程序执行结果:D0=2#1100110011000011
- 下图所示的梯形图程序,若初始时D0=2#1111111100000000,则分析正确的选项是( )
![]()
A.程序的执行结果:D0=2#1111000000001111,M8022=1
B.程序的执行结果:D0=2#0000111100001111,M8022=0
C.程序的执行结果:D0=2#0000000011111111,M8022=1
D.程序的执行结果:D0=2#0000111111110000,M8022=0
- 如下图所示的梯形图程序,若初始时D0=2#1111111100000000,则执行结果正确的选项是( )
![]()
A.程序执行结果:D0=2#1111000000001111,M8022=0
B.程序执行结果:D0=2#1111000000001111,M8022=1
C.程序执行结果:D0=2#0000111111110000,M8022=0
D.程序执行结果:D0=2#0000111111110000,M8022=1
- 如下图所示梯形图程序,下列分析错误的选项是( )
![]()
A.当X10由OFF→ON时,M0~M15中的各位数据向右移4位
B.当X10由OFF→ON时,X0~X3中的4位数据移入M12~M15中。
C.当X10由OFF→ON时,M0~M3中的4位数据从低位端溢出
D.当X10由OFF→ON时,M7~M3中的4位数据移入M3~M0中。
- 如下图所示梯形图程序,分析错误的选项是( )
![]()
A.执行结果:M15~M12中的原始数据溢出。
B.执行结果:M11~M8→M15~M12
C.执行结果:M7~M4→M11~M8
D.执行结果:X000~X003→M3~M0
- 下图所示的梯形图程序中,执行结果分析错误的选项是( )
![]()
A.执行结果:D13~D10中的原始数据溢出
B.执行结果:D17~D14→D13~D10
C.执行结果:D3~D0→D25~D22
D.执行结果:D21~D18→D16~D13
- 下图所示的梯形图程序中,执行结果分析错误的选项是( )
![]()
A.执行结果:D13~D10中的原始数据溢出
B.执行结果:D21~D18→D25~D22
C.执行结果:D17~14→D21~D18
D.执行结果:D3~D0→D13~D10
- 判断题(正确的在括号内打“√”,错误的在括号内打“×”,每题1分,共20分)
- 为了便于记忆,每个功指令都有一个助记符。( )
- FXGP软件中不能直接输入助记符,输入的是功能号。( )
- 功能指令的执行形式分为脉冲执行方式和连续执行方式两种类型。( )
- 功能指令的数据长度可分为16位和32位两种类型。( )
- 一般来说,功能指令的功能号和助记符占两步程序步。( )
- 传送指令 MOV 是将源操作数内的数据传送到指定的目标操作数内。( )
- 传送指令可以传送16位数据。( )
- 传送指令可以传送32位数据。( )
- 传送指令占2步程序步。( )
- FMOV指令的源操作数可取除V、Z以外的所有的数据类型。( )
- FMOV指令的32位操作方式是DFMOV指令。( )
- FMOV指令的脉冲执行方式是FMOVP指令。( )
- ROR指令的指令编号及助记符: FNC31 ROR [D·] n。( )
- 左循环移位指令可以操作16位数据,也可以操作32位数据。( )
- ROL指令的执行类似于ROR,只是移位方向相反。( )
- 左循环移位指令执行过程中,最后移出的那一位将进入进位标志位M8023。( )
- “异或”运算可以理解为不考虑进位的按位减法运算。( )
- 异或指令可以分为连续执行方式和脉冲指令方式两种形式。( )
- NEG指令的功能是将指定的目标元件中的数,进行二进制求补运算,然后将求补结果再送入目元件中。( )
- WOR前面的“W”表示32位字操作。( )